
Humanoid Robotics at Politecnico di Milano
human-like design
neuronal controllers








Since 2000 we are developing a
humanoid robot using a biomimetic approach.
ROBOT HAND
The aim of our manipulation
research is the development of a prototype of a human-like artificial arm. We
base our design on the study of the natural limb, to emulate the kinematics and
the strategy of control, replicating the spinal and cerebellum neural circuits.
We started with the design of the hand, obtaining the Blackfingers prototype,
actuated with McKibben muscles. Then we defined a simplified mechanical
solution and produced Whitefingers.
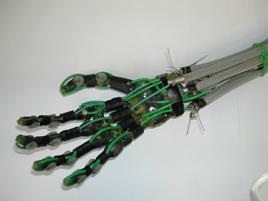
Blackfingers

Whitefingers
DOWNLOAD:
G. Gini, M. Folgheraiter, "Blackfingers: an artificial hand that copies
human hand in structure, size, and function",Proc. IEEE Humanoids
2000, MIT,
M. Folgheraiter, G. Gini, M.
Perkowski," Adaptive Reflex Control for an Artificial Hand", 7th int
IFAC Symposium on robot control, Syroco 2003,
M. Folgheraiter,
G. Gini, “Human-like reflex control for an artificial
hand”, BioSystem Journal, ElsevierScience,
76, (1-3), August-October 2004, p 65-74.
BIO_INSPIRED ARM
Then we
developed Maximum one, a full right arm.

Maximum
One
Our robot
arm differs in many aspects from other similar systems.
First, it
has a full 3DOF joint for the shoulder, moved by five artificial muscles.
Furthermore, we employed light materials and actuators. Finally, we attached
the real prototype to a fully developed control system that simulates the
motoneurones and cerebellar activities.
In order
to experiment with the control architecture and compare its behavior to the
human being, we also developed a kinematic and dynamic model of our arm
prototype, and used it in simulations.
In
particular we concentrated our work on testing a realistic artificial spinal
circuit that demonstrated the capacity to replicate the human myotatic and
inverse myotatic reflexes. Furthermore our experiments showed how it is
possible to apply a bio-inspired control architecture also to an artificial system
like our robotic arm. Surprisingly the system presented some behavior
comparable with those of the natural limb.
DOWNLOAD:
M. Folgheraiter,
G. Gini, "A Bio-inspired control system and a
VRML simulator for an autonomous humanoid arm",Proc. IEEE Humanoids 2003,October,
M. Folgheraiter, G. Gini,
"MaximumOne: an anthropomorphic arm with bio-inspired control
system", in Biomimetic Neural Learning for intelligent robots, S. Wernter,
G. Palm, M. Elshaw (Eds), LNAI 3575, Springer, Berlin Heidelberg, 2005, pp
281-298.
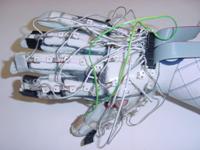
HAPTIC INTERFACES
To approach the programming of the arm through
demonstration, we developed a special glove. The glove can detect the position
of the fingers (angles of the phalanxes) and the force exerted by the user on
the thumb and medium fingers. Moreover the glove can give contact feedback to
the user on the fingertip (using a novel electro-stimulation device), and force
feedback on the finger.
We are conducting experiments about a kind of
imitation learning to teach the hand how to grasp objects.
We have developed a software environment where
the user can see the objects being modified by touch. We are also developing
new haptic devices for specific tasks.

The
user haptic interface
The
user command glove
The
graphic environment
DOWNLOAD:
M. Folgheraiter, I. Baragiola,
G.Gini, “Teaching
grasping to a humanoid hand as a generalization of human grasping data",
in:Knowledge Exploration in Life Science Informatics (KELSI), Lecture notes in
AI,Springer Verlag, November 2004. Pag 139-150.
M. Folgheraiter, G. Gini, D.
Vercesi, "A Glove Interface with Tactile feeling display for
Humanoid Robotics and Virtual Reality systems",Proc.International
Conference ICINCO 2005, Barcellona 13-17 September, 2005.
M. Folgheraiter, G. Gini, D. Vercesi,
"A new haptic
device for applications in virtual reality and humanoid robotics",
Integrated Computer-Aided Engineering, (IOSPress), Vol 13, N 3, 2006, pp
249-262.
BIPED ROBOT
For locomotion we are studying a mechanical design
that exploit compliance. We have designed and built LARP.
The actuator system of LARP has a variable
stiffness of the joints. The actuator in fact is a servomotor with a torsion
spring and a damper.. In this way we can store energy in the joint to adsorb
disturbances and we have an estimate of the external moment by measuring the
deflection of the spring. Moreover we can obtain a real time control of the
joint stiffness to adapt it to the external load to reduce, for instance, the
inertial load.
We have developed a simulation using Adams and
Matlab Simulink. The model has shown a good local stability to external
disturbances, and is able to go back to the vertical position after being
pushed.
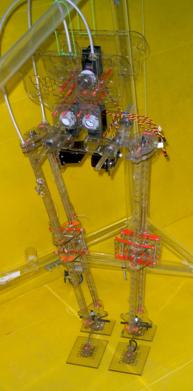
LARP:
the prototype

LARP:
the foot
DOWNLOAD
U.
Scarfogliero, M. Folgheraiter, G. Gini, “Advanced
Steps In Biped Robotics: Innovative Design And Intuitive Control Through
Spring-Damper Actuator” Proc. IEEE Humanoids 2004,
U.
Scarfogliero, M. Folgheraiter, G. Gini, "LARP, Biped Robot Conceived as
Human Modelling", in Biomimetic Neural Learning for intelligent robots, S.
Wernter, G. Palm, M. Elshaw (Eds), LNAI 3575, Springer, Heidelberg, 2005, pp
299 - 314.
G. Gini,
U. Scarfogliero, M. Folgheraiter, "Human-oriented
biped robot design: insights into the development of a truly anthropomorphic
leg", Proc IEEE ICRA 07, 10-13 April 2007,
ROBOT HEAD
We are
developing a robot head with stereovision and possible inclusion of other
sensors.

The head for Maximum_one
DOWNLOAD
G. Gini,
A. Marchi, "Indoor Robot Navigation with Single Camera Vision",
Proc.Pattern Recognition in InformationSystems, PRIS,
HE_KNOWS
We have
developed a robot nose, he_knows, based on a matrix of sensors and devised to
recognize and classify substances.

control panel and measuring chamber of he_knows
QUADRUPED ROBOTS
Our quadruped robots, ASGARD and
WARUGADAR, have 12 dof and are actuated
through electric servos. WARUGADAR uses piezoelectric sensors. Another
quadruped, ULISSE, is pneumatically actuated.

ASGARD

leg and sensors of WARUGADAR

Ulisse
DOWNLOAD
M.
Folgheraiter, G. Gini, A. Nava, N. Mottola, "A bioinspired
neural controller for a mobile robot", Proc 2006 IEEE International
Conference on Robotics and Biomimetics (ROBIO 2006) Kunming, CHINA, December
17-20, 2006
G. Gini,
P. Belluco, T. Ferrari, “A new distribuite software architecture within the
Pyro environment for a quadruped robot”, Proc IEEE CLAWAR, World Scientific
Publ Company,
TELEPROGRAMMING
We are developing the applications needed to
telecontrol the robot. They are interfaced to the user through our haptic
device.
DOWNLOAD
G. Gini,
D. Librandi, "Teleprogramming a CRS robot through the internet",
Proc. IARP International worshop on Human Robot interfaces,
G. Gini,
"Robotics
education, teleprogramming, telecontrol through the internet", Proc ISR2004, Paris (
HAND PROSTHESIS
Our study
of the hand is also aimed at designing new prosthesis. We are working now on
controlling them through EMG signals.
DOWNLOAD
M. Folgheraiter, G. Gini,
M.Perkowski, M. Pivtoraiko, "Blackfingers: a
sophisticated hand prosthesis", Proc ICORRR 2003, International
Conference on rehabilitation robotics,
M. Arvetti, G. Gini, M. Folgheraiter
“Classification
of EMG signals through wavelet analysis and neural networks for controlling an
active hand prosthesis”, Proc ICORR 2007, Noordwijk, The
Netherlands, June 13-15, 2007.
REHABILITATION ROBOTICS
The
analysis of mio-electric signals is also the basis for controlling a patient
rehabilitation using an exoscheleton.
DOWNLOAD
M. Mulas,
M. Folgheraiter, G. Gini, "An EMG-controlled Exoskeleton for
Hand Rehabilitation ",Proc.International
Conference ICORR 2005, Chicago.

hand exoscheleton
Contacts
gini @elet.polimi.it
michele.folgheraiter@dfki.de